原标题:民航货运安检系统研究与应用
广告 | 点击查看
摘要:常规的安检系统受限于安检机速度、人工判图速度等因素,安检效率、跟踪准确率、自动化程度一直没有较大的提升。民航货运安检系统要求对各种包裹的跟踪、颗粒机剔除绝对准确,同时在异常自动倒带工况下,仍需保证包裹图片、条码、路向信息的准确绑定与交互。针对民航安检系统的控制难点,本文从工艺布局、控制流程、接口交互、仿真验证等几个方面进行剖析和阐述,研发了一套民颗粒机航货运安检系统,系统采用高速自动分配逻辑、变速控制、高速剔除、高速合流等方式,实现安检效率的极大提升,同时通过系统仿真进行流量模拟,保证系统稳定可靠运行。
关键词:动态跟踪策略、倒带跟踪、流量控制、实时颗粒机监测、仿真系统
作者:张广会 梁政宇 武慧勇 刘玉绒
广东信源物流设备有限公司
一
民航货运安检系统现状
随着当前电子商务的飞速发展,人们的购物便利性大幅提升,带来了物流行业迅速扩张。传统的汽车输送、铁路输送,颗粒机时效较长,已不能满足人们的需求,因此各大物流公司迅速布局航空货运。近年来以顺丰为代表的航空物流发展迅猛,但庞大的快件基数给航空安全带来了巨大的挑战,每一件快件都需要保证100%安全且满足时效要求[1]颗粒机。
传统的民航货运安检系统,通过人工摆件、单线作业,自动化程度较低、安检异常风险较高,同时安检判图效率无法满足目前货运的时效要求[2];只能通过增加安检机数量、增加判图人员这种高成本方式进行系统扩展来提颗粒机升时效,带来的是人工劳动强度大、成本大幅提升,以及系统布局不合理,灵活性差等缺点[3]。
为解决这一难题,需要从系统布局、控制系统、安检流程等方面进行改进和优化。本文针对安检控制系统进行深入研究,利用现颗粒机场总线、动态跟踪策略、安检分层系统等实现高安全、高效率的民航货运安检控制系统。同时开发仿真系统,在设备进厂前进行工艺、控制流程的全面仿真,及时排查风险,同时反馈工艺进行优化改进。
二
民航安检流程
民航安检颗粒机的工艺流程如图1所示,包括网点收寄装车转运、机场卸车、矩阵分拣/分拣机分拣(陆侧)、安检、矩阵分拣/分拣机分拣(空侧)等。
1.网点收寄装车转运:快件收寄后,通过三级、二级快递中转场进行转运;将需要进行颗粒机航空转运的包裹,送往机场陆侧卸车;由于货运机场也是一个大的快递处理中心,不仅仅处理航空件,对于在机场辐射范围内的不需要航空转运的陆到陆快件,仍将送至机场进行陆到陆的分拣作业。
2.机场卸车:卸车一般采用颗粒机多条卸车线,二合一散件流+单件分离的方式,或者单件流二合一的方式,效率可达5000~6000件/小时。
3.矩阵分拣/分拣机分拣(陆侧):快件卸车后,通过扫描、摆轮分拣、分拣机二次细分等环节,实现快件的颗粒机陆侧输送、空侧输送的分离。
4.安检:需要进入空侧装机的快件,从陆侧分拣机高速(2.7m/s)导出后降至1.5m/s,控制系统接收分拣机的包裹信息数据,同时与WCS系统进行交互,获取安检所需要信息(存图颗粒机地址、重量、体积等信息);包裹到达安检机时降速至0.4m/s,然后再提速至1.5m/s进行剔除判断,整个过程需要保证全程跟踪。在进入安检机前,控制系统需要与同屏比对系统进行交互,发送包裹信息,接收包裹颗粒机判图结果,然后再次与WCS系统进行交互,获得包裹的最终分拣格口。对于需要开检的包裹通过摆轮等分拣设备剔除至离线查验区,通过人工开检后,二次上线。对于安检通过的包裹,再次合流后,进入空侧矩阵系统或分拣机颗粒机。
5.矩阵分拣/分拣机分拣(空侧):通过空侧分拣机进行细分,将包裹分到不同的航空打版箱,然后上机转运。
本文重点研究安检系统,涉及到与陆侧分拣机的包裹收发与信息交互、WCS的信息交互、包裹的降速跟踪、同颗粒机屏比对系统的交互、安检机的交互、剔除摆轮的对接等。
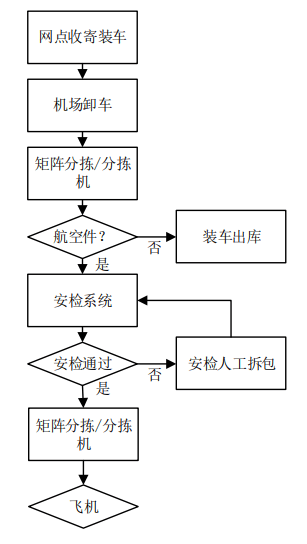
图1 民航安检的工艺流程示意
三
安检系统
1.系统布局设计
常规安检系统单线作业,受限于安检机速度,效率无法提升。为应对这一问题,采用高速分流+多线安检+高颗粒机速合流的模式,提升上货效率,保证安检整体效率,系统自动化程度显著提升。系统布局示意图,如图2所示。
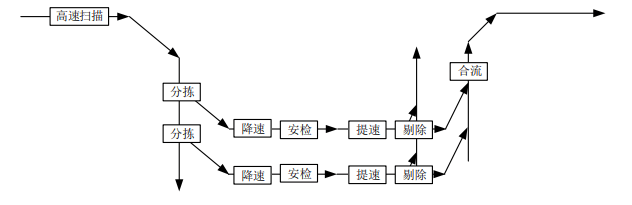
图2 民航安检的工艺流程示意
(1)高速扫描+分拣:为实现多路安检,需要在上游进行包裹的流量均分。包裹流颗粒机量均分可以通过多种方式实现,比如分拣机、摆轮。具体实现方式可以根据场地大小、安检场景(比如是否民航海关共用、是否区分普通快件和电商件等)确定。
(2)降速+安检+提速+剔除+合流:受限于安检机速度,一般颗粒机在0.2~0.4m/s之间,同时判断时间一般在10~30s波动,所以采用高速(流量分配)-低速(安检)-高速(合流导出)的布局方式,实现效率的最大化。
2.动态跟踪策略
安检系统的主要控制对象是输送设备以颗粒机及包裹,如何准确获得包裹的实时位置至关重要,本节主要讲述三节输送机间的包裹动态跟踪策略。
在输送系统的跟踪策略中,要考虑多种因素:
(1)设备方面主要有输送设备的启停斜坡曲线、启停响应、速度以及系统效率要颗粒机求等;
(2)包裹方面主要有包裹类型、尺寸、形态、重量等因素;
(3)系统上下游的运行工况,如上游进货频率、上游进货速度、安检人员判图速度、下游系统的流畅程度、系统实时降速再提速、是否有连锁启停等。
通过对颗粒机以上因素的分析,需要为每个包裹设定多个参数,主要包含包裹头部位置、长度、尾部位置、触发出口光电标志、误触发标志、滞后偏移标志、异常标志、包裹条码信息等;这些信息跟随包裹在系统中进行实时传送。
对于一般的颗粒机恒速跟踪系统,通过速度×时间的方式,进而锁定包裹位置,再配合一些校验程序,可以准确计算包裹位置,但对于民航安检控制系统不适用,这里涉及到降速、提速、积放、等待、判图等流程操作,对跟踪策略的要求极高,线颗粒机体速度配置如图3所示。
图3 典型安检线配置
图3所示为安检系统中的一段。包裹进入安检系统时,一般以高速1.5m/s导入,然后逐级降速至0.4m/s进行安检,再逐级提速至1.5m/s至下游摆轮分拣。这一过颗粒机程中,需要对包裹状态进行实时的动态跟踪,主要控制要点及控制流程如下:
a.安检跟踪:主要围绕包裹进行,所有的跟踪信息,都会在包裹结构体变量中体现,如表1所示。

表1 包裹跟踪信息结构体
b.降速/加速接口处颗粒机包裹位置跟踪:在包裹进入安检系统时,控制系统与WCS系统进行交互,获取包裹的条码、长宽高、重量等数据,同时通过光电传感器、输送机实时速度等方式计算包裹长度、包裹重心,并与获取的包裹信息进行校核,标记包颗粒机裹是否长边朝前,为后续跟踪计算做准备,同时,对于数据偏差较大的包裹,标记异常,在安检机后做剔除处理。
通过输送机码盘信号、光电信号、以及当前降速/加速的运行情况,实时计算每个包裹的位置信息。在包裹即将经颗粒机过变速接口时,检测接口处是否有足够的空白导入段,预测是否可以完全进入下游。如可以进入,则当包裹重心跃过接口时,将包裹信息传入下游设备,同时清空本机包裹信息;否则包裹等待,同时输送设备连锁停机。
c.安检颗粒机内部包裹位置跟踪:对于安检机一般都配置有多道铅帘,会影响包裹在内部的传输,因此对于较轻、较小包裹避免上线,同时要增加多种过滤、校验程序,降低铅帘造成包裹位移、跟踪异常等情况。安检机内部一般配置有两个入颗粒机口/出口光电传感器,通过入口光电,提前校准位置,减少第一道铅帘的影响,同时通过出口光电,再次确认跟踪位置,如在允许偏差范围内,则更新包裹位置信息,否则标记跟踪异常,通过下游剔除口进行摆出。
d.安检倒带颗粒机对跟踪的影响及应对:安检系统通常是分拣系统中的一个环节,下游异常、流量超负荷时,一般安检系统需要同步降效以及积放等待。为保证安检图片的准确性,在积放等待时会产生安检机倒带的情况,如处理不当,极易造成连颗粒机包、多次安检等情况。在安检的入口,需要实时计算安检线流量,以及安检下游系统的负荷情况。需要及时预测是否有停机等待的情况发生,提前清空安检机内部包裹,避免停机时安检机内部存有包裹。对于无法排空时,需要实颗粒机时计算安检机倒带时间,通过检测倒带时包裹触发入口/出口光电、安检机内存有包裹数量、是否触发安检员判图等方式,调整包裹跟踪位置、安检信息等,保证包裹跟踪的准确性。
3.信息交互
安检交互主要是指包裹进入安检颗粒机机前,以及出安检机后,控制系统与安检机、同屏比对系统之间的信息传输,涉及到状态交互以及信息交互。状态主要涉及到急停、启停、故障等硬件信号;信息涉及到包裹条码传送,判图结论的收发等,如图4所示。
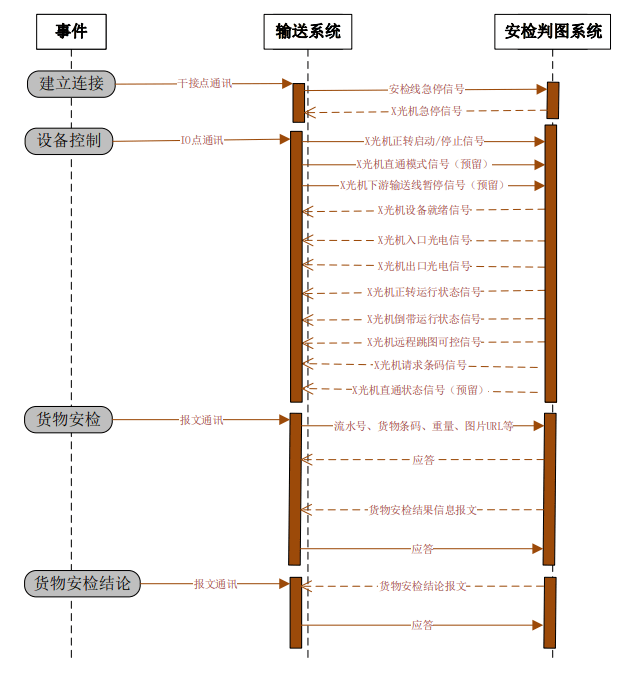
图4 信颗粒机息交互
包裹在经过安检机内部时,实时跟踪包裹位置信息。在经过射线区域时,安检机内部光电触发,同时发送请码信号;控制系统接收到安检机请码信号后,输送系统发送该包裹的条码、重量、存图地址等相关信息至同屏比对颗粒机系统;由远程安检机房安检人员进行判图,同时回传判图结果。如果安检人员对该件包裹有疑问,会进行停机倒带重过光机;如果包裹异常,则发送改判信息至控制系统;控制系统收到相应指令后,控制剔除摆轮完成相应的剔除颗粒机动作,同时反馈剔除结果至同屏比对系统。
4.异常剔除
包裹经过安检机后,为避免下游异常、连锁停机时,包裹滞留光机内部的情况发生,需要提速输送,将包裹快速输送出去。在经过剔除机构时,判断是否收到安检结果。如颗粒机在判断时间范围内未收到安检结果,则包裹在剔除摆轮前停机等待;当等待时间超过设定值时,超时剔除,同时将安检结果、剔除结果实际上传至WCS系统。
四
系统仿真
为了全面排查系统风险,开发仿真控制系统,采用实体控颗粒机制器与仿真模型进行实时交互,验证主线与多条安检线体的分配逻辑、降速跟踪策略、倒带校验程序、分拣剔除程序、WCS交互等。
1.仿真系统的搭建:文章采用DEMO 3D软件搭建仿真平台,如图5所示,使用西门子颗粒机S7-1500系列PLC开发控制程序,使用C#语言开发同屏比对接口以及WCS接口,实现仿真平台-实物PLC-同屏比对接口-WCS接口的联调。
图5 仿真模型
2.采用多种仿真策略,验证主线流量分配逻辑。主颗粒机要有交叉循环分拣(依次逐个分拣至安检线)、瀑布式分配(同一条线连续分拣)、随机分拣等方式,验证通过哪种分拣方式能够最大程度发挥安检线的效率,同时优化线体积放启停、合流策略,保证跟踪的准确性,降低收容率颗粒机。
3.仿真结论:仿真环境下平均包裹尺寸500mm,主线速度2.0m/s,5条安检速度0.4m/s,线体降速-提速配置为:2.0m/s -1.8 m/s-1.5 m/s -1.2 m/s -0.9 m/颗粒机s -0.7 m/s-0.4 m/s(安检机)-0.7 m/s -0.9 m/s-1.2m/s -1.4 m/s -1.5m/s(剔除摆轮),针对主线交叉循环分拣、瀑布式分拣、随机分拣进行仿真测试,结颗粒机论如表2所示。
表2 仿真结论
通过系统仿真,实现速度的分配测试、工艺流程的优化处理、系统整体的流量平衡测试等功能,极大的减少系统调试周期,提早交付,同时可以通过仿真及时验证异常逻辑,离线排查和验证问题,颗粒机进行在线修复,最大限度降低对已投用系统的影响。
五
小结
项目运行后效果本文针对民航安检控制系统从系统布局、控制流程、接口交互等方面进行研究。深入挖掘系统中存在的风险点,并提出了针对性的解决方法。研究开发一颗粒机套面向民航货运的安检控制系统,实现包裹的快速输送、精准跟踪、数据实时交互、信息实时上传等功能。开发相应的异常处理机制,针对停机、安检机倒带等情况,进行深入剖析,研究开发动态跟踪策略,保证安检信息的准确颗粒机性。
参考文献:
[1]潘灿辉. 物流分拣技术发展趋势浅析[J].物流工程与管理,2019(41):99-105.
[2]郑伟,李嘉毅,田铮. 浅谈民航安检整体解决方案设计[J].民航管理,2019(08)颗粒机:78-80.
[3]邱建伟,许杰. SF桂林中转场快件分拣系统仿真与优化[J].物流科技,2019(10):21-25.
———— 物流技术与应用 ————
编辑、排版:罗丹返回搜狐,查看更多
责任编辑:
扫描二维码推送至手机访问。
版权声明:本文由木屑颗粒机_燃烧生物颗粒机那里有_生物质燃料颗粒机器设备发布,如需转载请注明出处。